Endüktif, alüminyum bant navigasyon sisteminde AGV nin çalışacağı yollara yapıştırılmış alüminyum bantlar bulunur. Bu navigasyon yönteminde , AGV endüktif sensorler ile yerdeki bantı takip eder. Bantlar zeminde olduğundan kolayca yıpranabilirler bu nedenle sık sık bakımlarının yapılması ya da üzerlerinin koruyucu bant veya epoksi boya ile kapatılması gerekir.
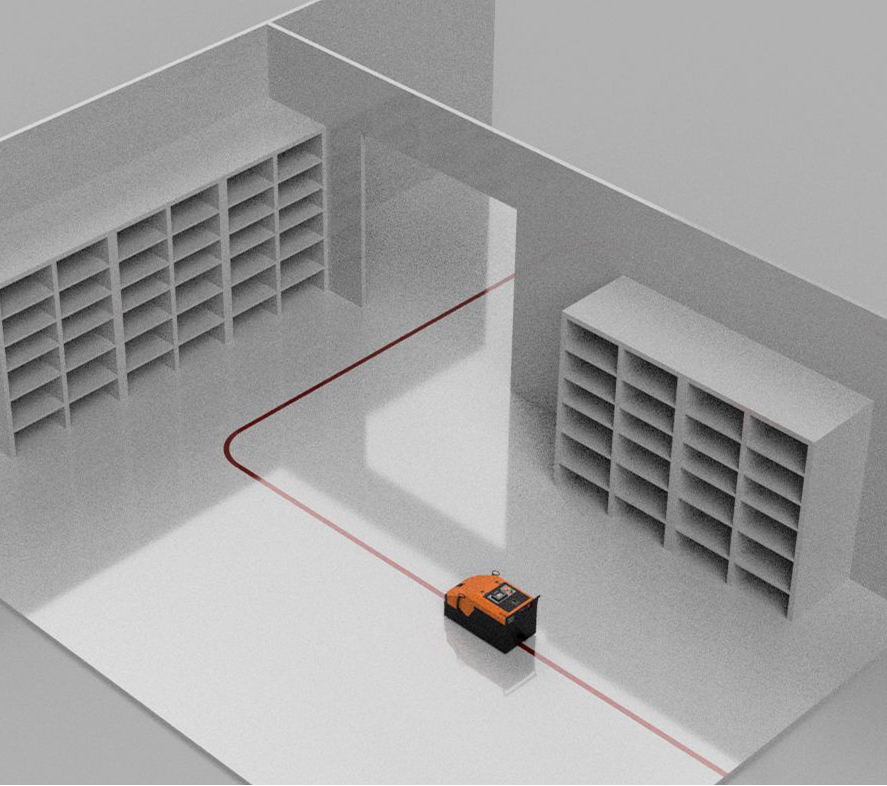
ENDÜKTİF ALÜMİNYUM BANT TAKİBİ
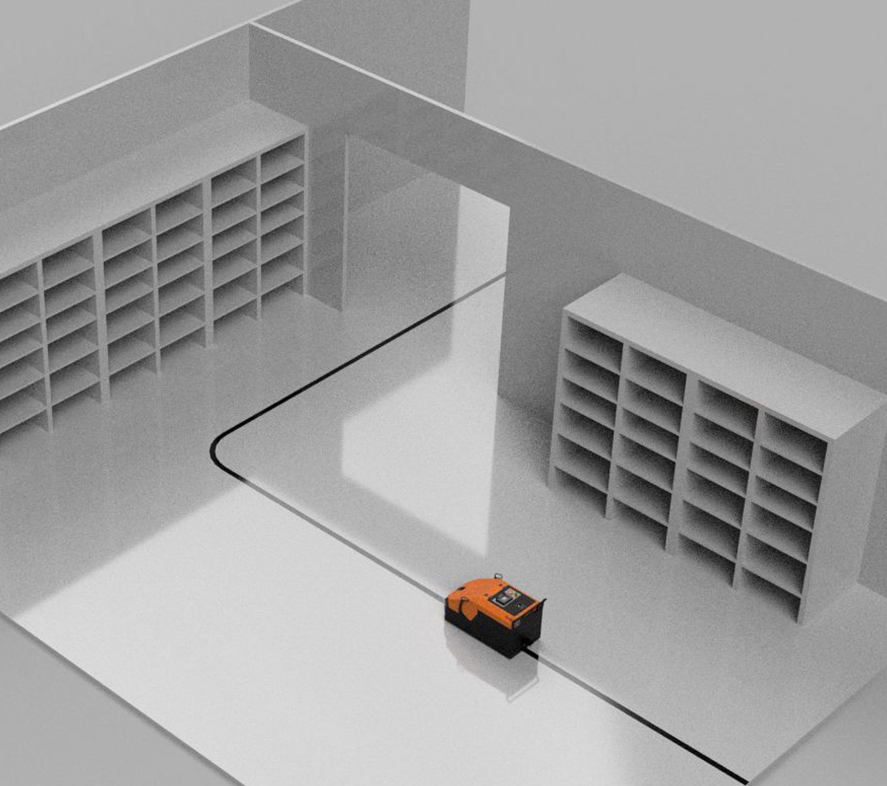
MANYETİK BANT TAKİBİ
Bu yönlendirme sisteminde zemin yüzeyine manyetik bant yapıştırılır. Bandın zemine uygulanması kolaydır. AGV konumunu belirlemek için manyetik bant algılayıcı sensör kullanılır. Sensör bandın konumunu takip ederek AGV nin yönlendirilmesi sağlanır. Bant zemine uygulandığı için yıpranması kolaydır ve sık sık bakım yapılmasını gerektirir.
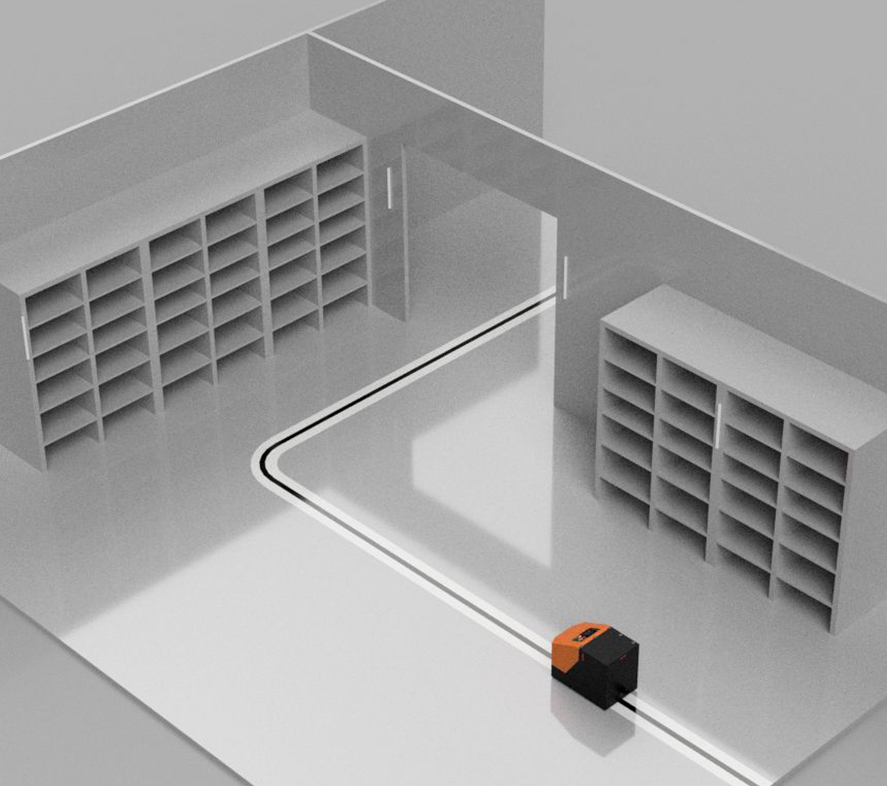
OPTİK YÖNLENDİRME
Zemine boya veya renkli şerit bant uygulanır. AGV yolu tespit etmek için yerleşik bir optik sensöre sahiptir. Bazı sistemler, şeridi aydınlatmak için ultraviyole (UV) ışık kaynağı da kullanır. Tipik olarak tesislerde veya depolarda kullanılmaz, çünkü zemin hattının sıklıkla temiz tutulması veya yeniden uygulama yapılması gerekir.
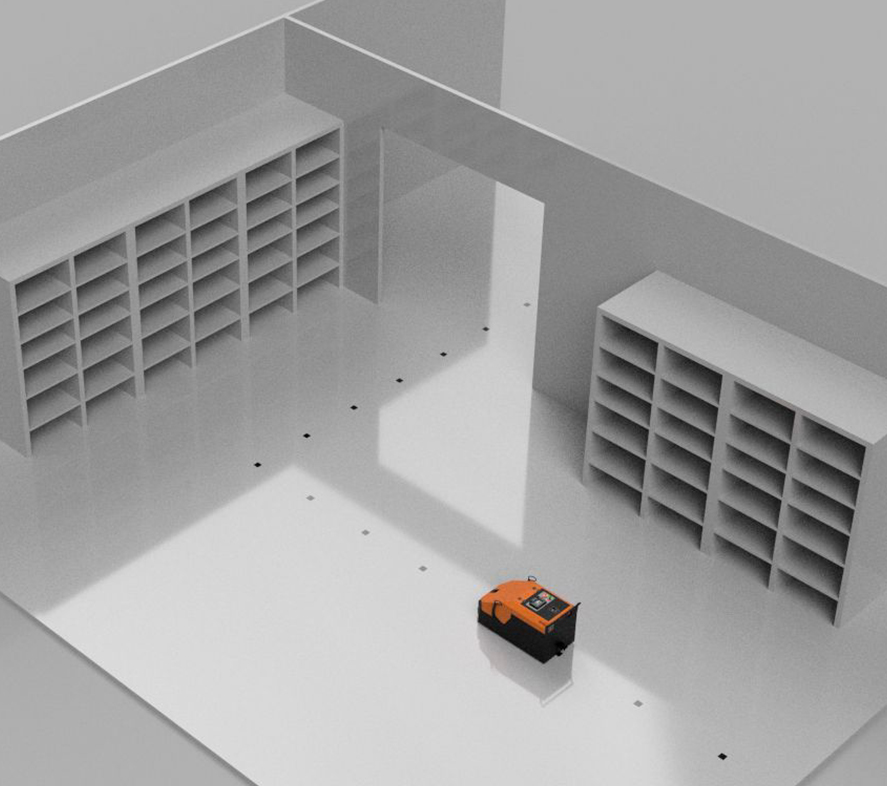
SPOT NAVİGASYON
Spot navigasyon AGV’nin pozisyonunu tespit etmek için zemine yerleştirilen mıknatıs yapısına sahip referans noktalarını izler. Referans noktaları, aracın hafızasına kaydedilen x, y koordinatlarına karşılık gelir. Bu noktalar AGV üzerinde bulunan sensör tarafından algılanır ve aracın yön ve gittiği mesafe de ölçülerek bu bilgiler doğrultusunda aracın rotasını takip etmesi sağlanır.
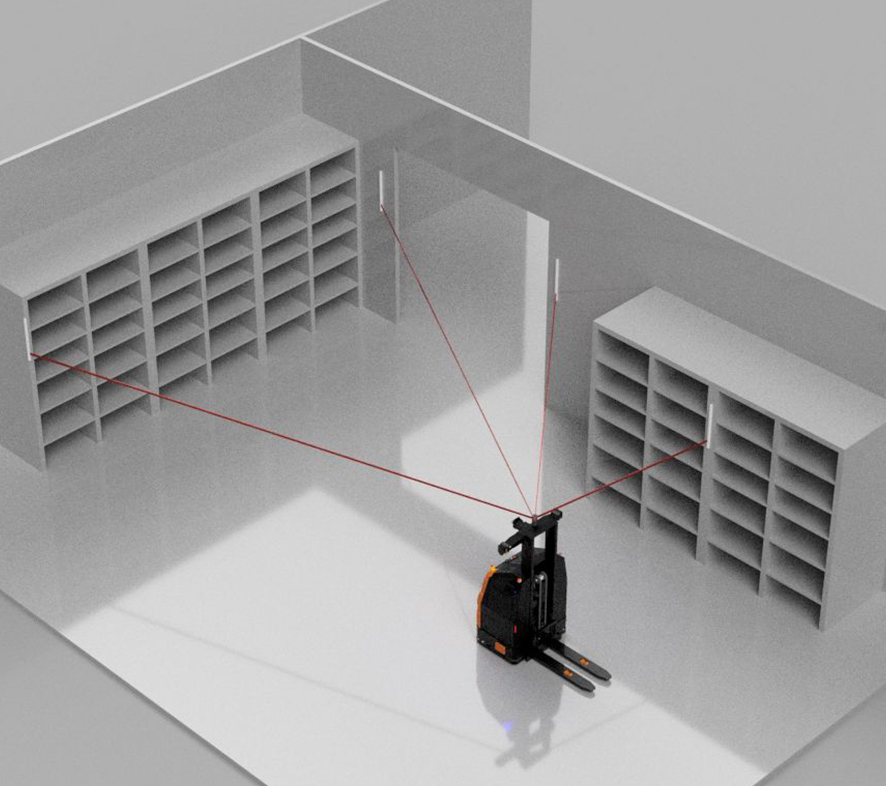
LAZER NAVİGASYON
Tesis içerisinde AGV nin çalıştırılacağı rota boyunca reflektörler konumlandırılır. Bu rota üzerindeki reflektörleri algılamak içinse bir lazer tarayıcı kullanılır. Reflektörlerden alınan yansımalar aracılığıyla araç kontrol algoritmaları AGV nin konumunu üçgenleme metodu ile hesaplar ve daha önce araca girilen verilerle karşılaştırma yapılarak rota hesaplanır.
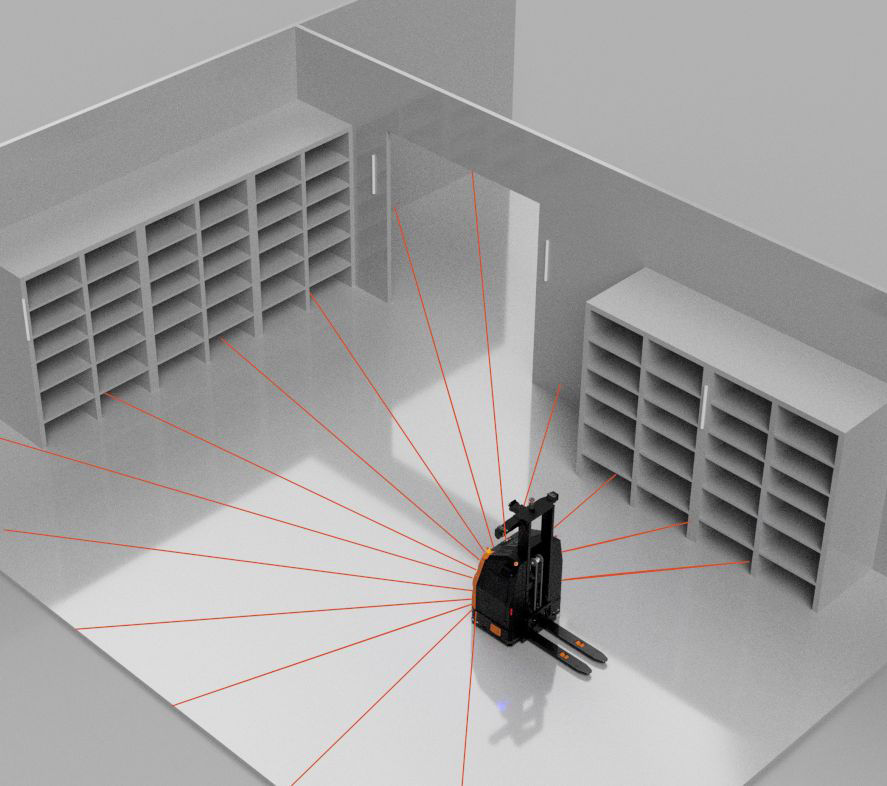
DOĞAL NAVİGASYON
Çalışma alanı AGV üzerindeki lazer tarayıcı ve tarayıcılar ile ölçülür. Çalışma alanının referans görüntüleri aracın hafızasına kaydedilir ve saklanır (çalışma ortamı haritası). Navigasyonun sağlanması için doğal ortam yani duvarlar, kolonlar, makineler, bariyerler vb. çalışma ortamında bulunan nesnelerden yansıyan veriler kullanılır. Konumlandırma doğruluğu uygun çevre koşullarına bağlıdır ve +/- 1 cm’dir.